AUTONOMOUS EXPLORATION AND NAVIGATION Challenge
Introduction
This challenge gathers an important number of researchers of ISPR axis. It deals with several important topics related to perception / localization as well as decision (planning/control) process, in order to achieve fully autonomous navigation / exploration of mobile robots in general and autonomous vehicles in particular.
The aim of this challenge is to ensure, though an overall architecture (cf. Figure 1), the reliability of autonomous navigation even in high dynamic / uncertain complex environments / situations (mono and multi-vehicle systems). The main societal and industrial targets are liked to “Transport of tomorrow” and “Manufacture of the future”.
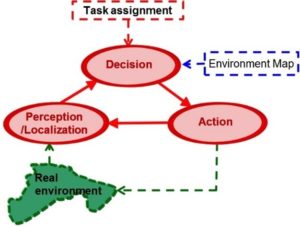
Figure 1: The several addressed topics, and their interaction, in order to produce reliable autonomous navigation of mobile robots / vehicles.
Some of the main used mobile robotic platforms

Some of the historical aspects of ISPR’s works on autonomous vehicles
ISPR axis work on the field of autonomous vehicles since more than 25 years. Figure 2 emphasizes, in short, some of the past and current main used vehicles. In addition, among the main experimental platforms used in ISPR, let us cite PAVIN (Plateforme d’Auvergne pour Véhicules INtelligents) corresponding to a surface area of 5000 m2 (cf. Figure 3), composed with: Streets: 350 m; Ground track: 230 m; Specific Buildings; Urban area (crossing with traffic lights, painted walls, intersections, roundabout, etc.). To perform highly realistic experiments, currently, 5 IPCab and 1 EZ10 are used in PAVIN.

Figure 2. Some of the main autonomous vehicles used in ISPR

Figure 3. PAVIN platform
ISPR in partnership with several local partners, for instance:

